|
ROS2Sonic
0.2.0
A ROS2 driver for R2Sonic MBES
|
|
ROS2Sonic
0.2.0
A ROS2 driver for R2Sonic MBES
|
#include "conversions.hpp"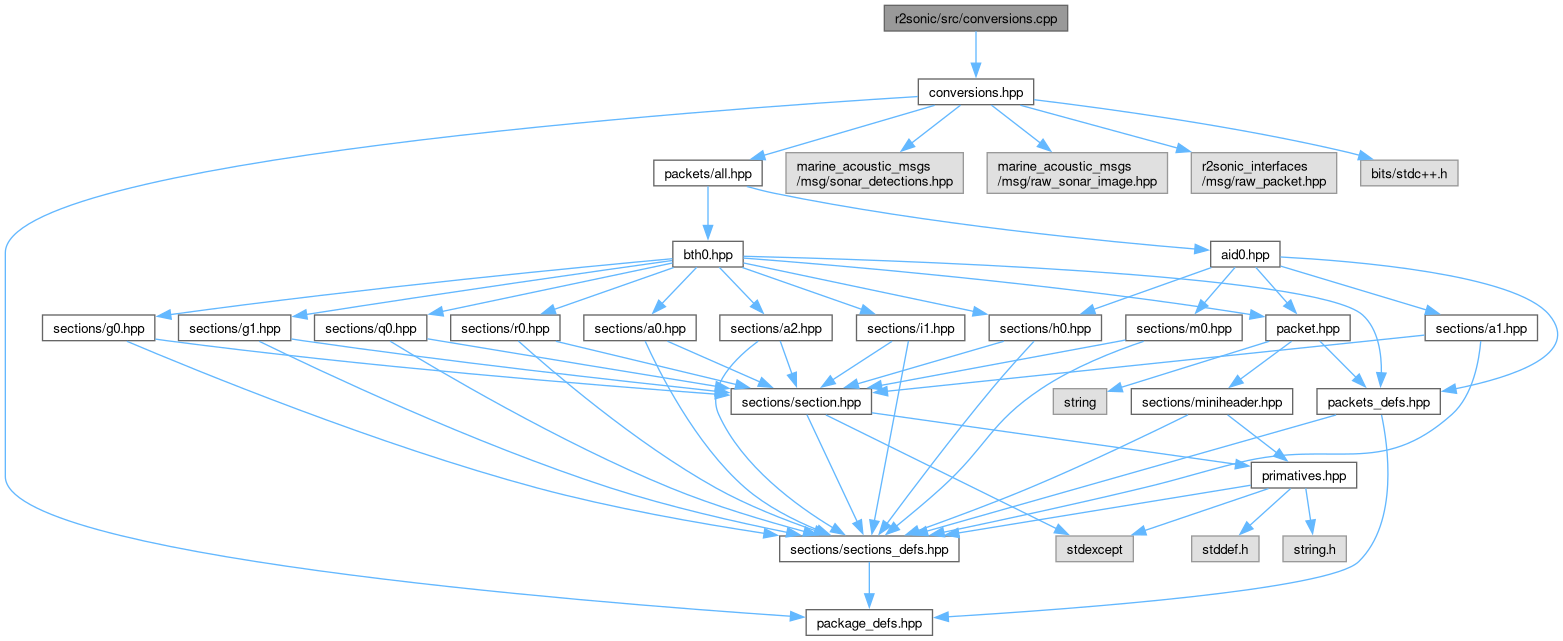
Namespaces | |
| namespace | conversions |
Functions | |
| void | conversions::h02Header (std_msgs::msg::Header *header, const sections::H0 &h0_pkt) |
| void | conversions::h02PingInfo (marine_acoustic_msgs::msg::PingInfo *ping_info_msg, const sections::H0 &h0_pkt) |
| void | conversions::bth02SonarDetections (marine_acoustic_msgs::msg::SonarDetections *detections_msg, const packets::BTH0 &bth0_pkt) |
| void | conversions::packet2RawPacket (r2sonic_interfaces::msg::RawPacket *raw_packet_msg, const packets::Packet *pkt) |