|
ROS2Sonic
0.2.0
A ROS2 driver for R2Sonic MBES
|
|
ROS2Sonic
0.2.0
A ROS2 driver for R2Sonic MBES
|
#include "r2sonic_node.hpp"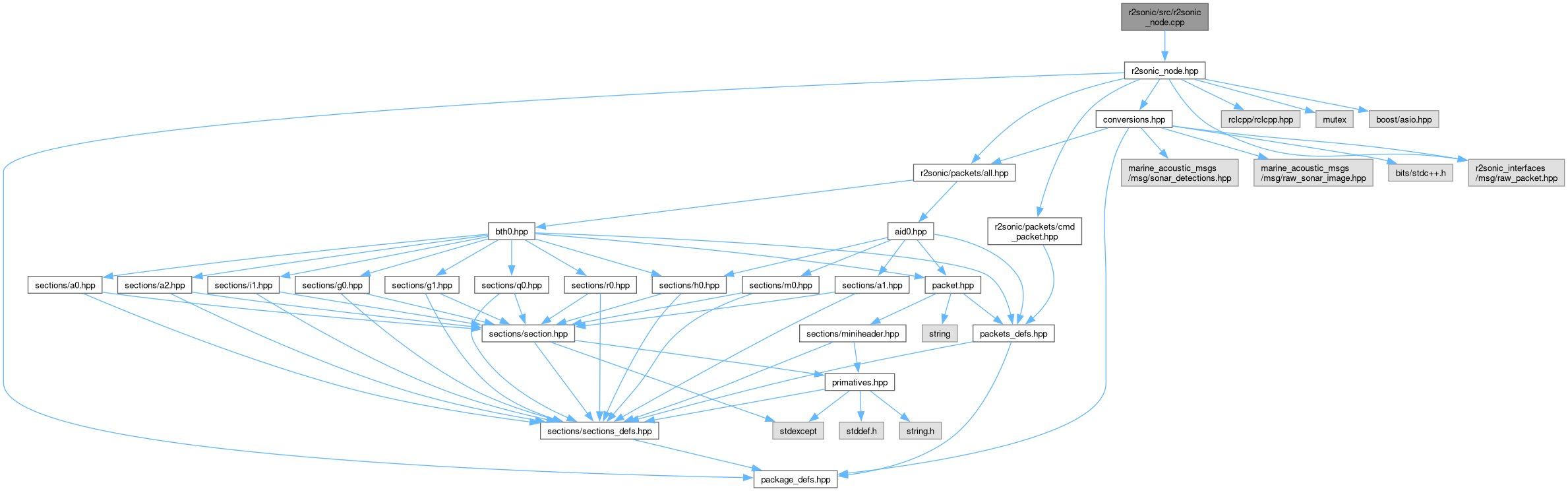
Functions | |
| template<typename T > | |
| NS_HEAD void | setupParam (T *variable, rclcpp::Node *node, std::string topic, T initial_val) |
| void | setupParam (std::string *variable, rclcpp::Node *node, std::string topic, std::string initial_val) |
| template<typename T > | |
| bool | send_udp_message (packets::CmdPacket< T > message, const std::string &destination_ip, const unsigned short port) |
| bool send_udp_message | ( | packets::CmdPacket< T > | message, |
| const std::string & | destination_ip, | ||
| const unsigned short | port ) |
| void setupParam | ( | std::string * | variable, |
| rclcpp::Node * | node, | ||
| std::string | topic, | ||
| std::string | initial_val ) |
| NS_HEAD void setupParam | ( | T * | variable, |
| rclcpp::Node * | node, | ||
| std::string | topic, | ||
| T | initial_val ) |