|
ROS2Sonic
0.2.0
A ROS2 driver for R2Sonic MBES
|
|
ROS2Sonic
0.2.0
A ROS2 driver for R2Sonic MBES
|
#include "package_defs.hpp"#include <rclcpp/rclcpp.hpp>#include <r2sonic/packets/all.hpp>#include <conversions.hpp>#include <mutex>#include <r2sonic_interfaces/msg/raw_packet.hpp>#include <boost/asio.hpp>#include <r2sonic/packets/cmd_packet.hpp>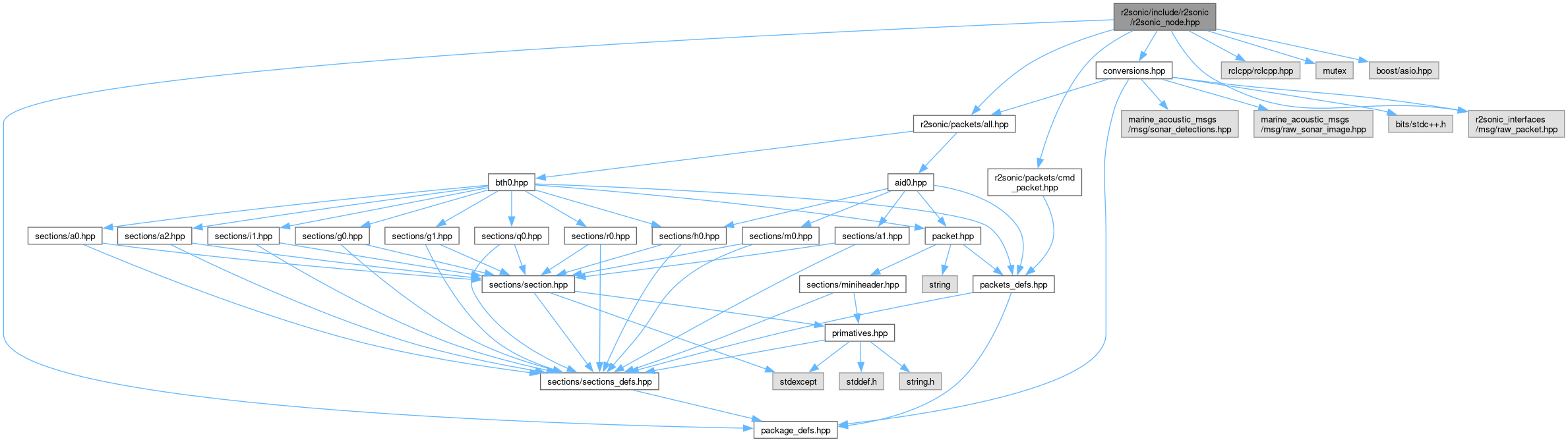
Classes | |
| class | r2sonic::R2SonicNode |
| The rclcpp::Node representing the connection between ROS and the R2Sonic Unit. More... | |
| struct | r2sonic::R2SonicNode::Parameters |
| a Structure that corresponds to the parameters advertised by the R2SonicNode class. All params assoicated with this struct will have the same structure struct. Example: topics.detections member mapps to param "topics/detections" More... | |
| struct | r2sonic::R2SonicNode::Parameters::Topics |
| struct | r2sonic::R2SonicNode::Parameters::Ports |
| struct | r2sonic::R2SonicNode::msgMtx_< MSG_T, STORAGE_T > |
| a colleciton of rosmessageg publisher and a mutex grouped for convienence. More... | |
| struct | r2sonic::R2SonicNode::MsgBuffer |
| a container for the messages we want to buffer More... | |
Namespaces | |
| namespace | r2sonic |