|
ROS2Sonic
0.2.0
A ROS2 driver for R2Sonic MBES
|
|
ROS2Sonic
0.2.0
A ROS2 driver for R2Sonic MBES
|
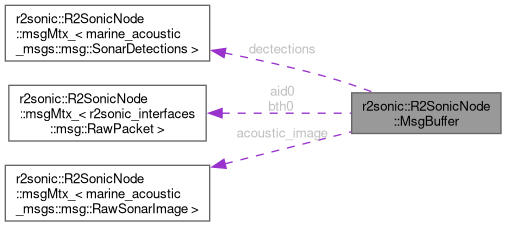
a container for the messages we want to buffer More...
#include <r2sonic_node.hpp>
Public Attributes | |
| msgMtx< marine_acoustic_msgs::msg::SonarDetections > | dectections |
| msgMtx< r2sonic_interfaces::msg::RawPacket > | bth0 |
| msgMtx< marine_acoustic_msgs::msg::RawSonarImage > | acoustic_image |
| std::map< u32, conversions::Aid02RawAiAssembler > | acoustic_image_assemblers |
| msgMtx< r2sonic_interfaces::msg::RawPacket > | aid0 |
a container for the messages we want to buffer
| msgMtx<marine_acoustic_msgs::msg::RawSonarImage> r2sonic::R2SonicNode::MsgBuffer::acoustic_image |
| std::map<u32,conversions::Aid02RawAiAssembler> r2sonic::R2SonicNode::MsgBuffer::acoustic_image_assemblers |
| msgMtx<r2sonic_interfaces::msg::RawPacket> r2sonic::R2SonicNode::MsgBuffer::aid0 |
| msgMtx<r2sonic_interfaces::msg::RawPacket> r2sonic::R2SonicNode::MsgBuffer::bth0 |
| msgMtx<marine_acoustic_msgs::msg::SonarDetections> r2sonic::R2SonicNode::MsgBuffer::dectections |