|
ROS2Sonic
0.2.0
A ROS2 driver for R2Sonic MBES
|
|
ROS2Sonic
0.2.0
A ROS2 driver for R2Sonic MBES
|
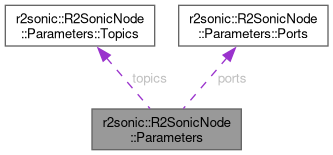
a Structure that corresponds to the parameters advertised by the R2SonicNode class. All params assoicated with this struct will have the same structure struct. Example: topics.detections member mapps to param "topics/detections" More...
#include <r2sonic_node.hpp>
Classes | |
| struct | Ports |
| struct | Topics |
Public Member Functions | |
| void | init (rclcpp::Node *node) |
| declares all the parameters and initialized all the stored variables within the struct | |
Public Attributes | |
| struct r2sonic::R2SonicNode::Parameters::Topics | topics |
| a container for the topics. | |
| struct r2sonic::R2SonicNode::Parameters::Ports | ports |
| a container for the ports | |
| std::string | sonar_ip |
| the ip address to send commands to the sonar | |
| std::string | interface_ip |
| the interface you want to listen on (0.0.0.0 to listen on all) | |
| std::string | tx_frame_id |
| the frame ID of the acoustic center of the transmitter | |
| std::string | rx_frame_id |
| the frame ID of the acoustic center of the receiver | |
a Structure that corresponds to the parameters advertised by the R2SonicNode class. All params assoicated with this struct will have the same structure struct. Example: topics.detections member mapps to param "topics/detections"
| void R2SonicNode::Parameters::init | ( | rclcpp::Node * | node | ) |
declares all the parameters and initialized all the stored variables within the struct
| node | A pointer or reference to the node you want to use to initialize the parameters. |
| std::string r2sonic::R2SonicNode::Parameters::interface_ip |
the interface you want to listen on (0.0.0.0 to listen on all)
| struct r2sonic::R2SonicNode::Parameters::Ports r2sonic::R2SonicNode::Parameters::ports |
a container for the ports
| std::string r2sonic::R2SonicNode::Parameters::rx_frame_id |
the frame ID of the acoustic center of the receiver
| std::string r2sonic::R2SonicNode::Parameters::sonar_ip |
the ip address to send commands to the sonar
| struct r2sonic::R2SonicNode::Parameters::Topics r2sonic::R2SonicNode::Parameters::topics |
a container for the topics.
| std::string r2sonic::R2SonicNode::Parameters::tx_frame_id |
the frame ID of the acoustic center of the transmitter